随着消费者对高级别辅助驾驶功能需求的不断升级,高速领航功能、自动泊车等功能已经成为很多智能汽车的标配。行泊一体市场呈现即将爆发态势,数据显示,未来三年行泊一体市场空间将达1000万辆。
目前,中国乘用车市场有50%左右的车型在10万—20万元之间,这也是行泊一体的目标市场。但要成功进入该市场,行泊一体产品需要实现高能力与低成本之间的平衡,这成为众多Tier 1面临的新课题。
“一键实现”行泊功能
日前,记者在北京体验了百度搭载在威马W6量产车上的行泊一体(百度ANP2.0)高级别辅助驾驶功能,从量产车的表现看,这种行泊一体功能很好地满足了驾乘者高速领航和自动泊车等高级别辅助驾驶功能需求。

ANP-后方来车显示
从北京亦庄桥出发,经过城市环路驶上大兴机场高速,再从北线高速经京台高速回到北京南六环,全程75公里的路程,涵盖了各种典型的高速公路场景,而在开启百度ANP2.0高速领航功能后,车辆在高速行驶过程中基本可以实现自动行驶,驾驶员只需关注路况做好随时接管车辆、结束自动驾驶状态的准备即可。

ANP-正在变道
在高速驾驶中,具备高速领航辅助驾驶功能的车辆大大提升了人类驾驶员的驾驶体验,也提升了高速行驶状态下车辆的安全性。进出高速路口,因为涉及较复杂的路况,往往对驾驶技术提出较大考验,也对高速领航辅助驾驶功能提出很大考验。当车辆进入高速公路时,ANP2.0能自动识别路况,车辆会自动切换至最左侧快车道,过程中,系统会根据路况自动避让其他车辆或在限定速度内自动超车。

ANP-匝道-准备出高速
当车辆进入最左侧快车道后,在系统引导下,车辆会按照系统设定的最高速度制定完成自动巡航行驶、跟车加减速且稳定保持在车道内,过程中,无论是直路、弯道还是上下坡道车辆都可以保持稳定的自动行驶。同时,在进出匝道时,车辆也可以自动按照导航路线指引,在匝道内自动减速,即使在Y字匝道内也能实现顺畅通行。

ANP-进入匝道&退出提醒
在一个多小时的试驾体验中,上述这些高速公路行驶中常见的各种路况,ANP2.0都可以轻松应对,给记者带来轻松的驾乘体验。在自动泊车方面,ANP2.0也有不错的表现,即使面对难度较大的机械泊车位,也可轻松泊入。体验过程中,记者驾驶的车辆面对一个新手司机不敢轻言挑战的机械泊车位,40秒就实现了自动泊入,堪比技术娴熟的老司机。搭载了ANP2.0功能的量产车,让记忆泊车、APA自动泊车可以轻松的“一键实现”,解决了很多新手司机泊车难的问题。
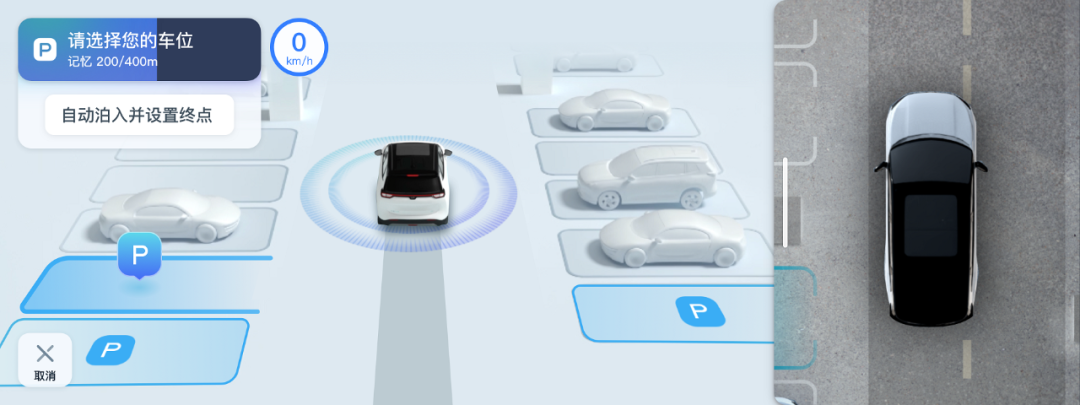
AVP-APA及设置终点
AVP-记忆泊车路线匹配
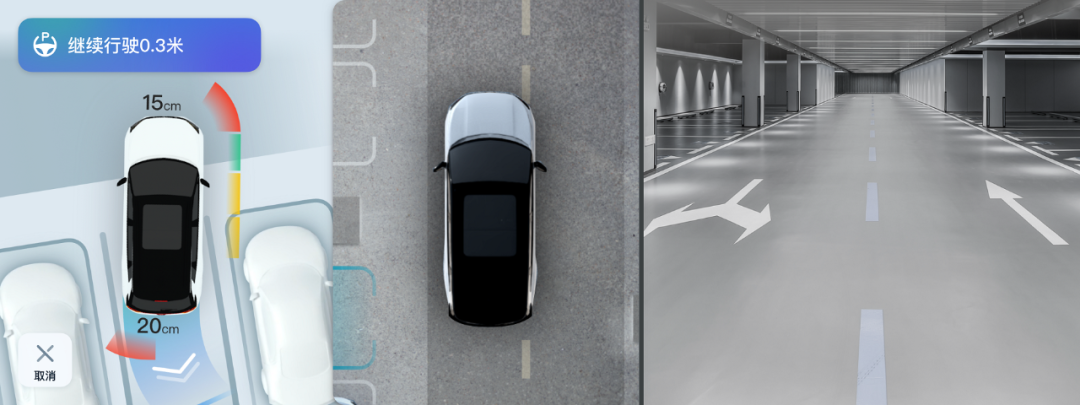
AVP-巡航途中泊入
超低的成本、越级的性能
如此强大的行泊一体功能,究竟会带来多大的成本增加,是考验高级别辅助驾驶功能搭载率的关键。百度智能驾驶事业群组首席产品架构师郭阳透露,百度ANP2.0的量产成本只有几千元,搭载了该功能的威马W6新车售价并没有上涨,也就是说,整车厂完全可以“不涨价”为车辆配置行泊一体高级别辅助驾驶功能,15万-25万元售价区间的车辆完全可以消化这套系统的成本。
百度ANP2.0之所以能在“不加价”的基础上实现如此强大的行泊一体功能,关键在于其双TDA4超低算力平台(16TOPS+44kDMIPS)。ANP2.0采用低成本的计算平台方案(双TDA4),将行车域、泊车域深度融合,真正实现了行泊一体。同时,ANP2.0将智驾与车机地图融为一体,采用地图的车道级渲染和真实世界还原,增加智驾的人机共驾体验和安全感,并降低了二者的联调成本。依托于双TDA4平台,ANP2.0只需要9颗摄像头、12颗超声波雷达和5颗毫米波雷达就可以满足车辆的感知需求,大大降低系统的硬件成本。
而且,ANP2.0与RoboTaxi车型共用的数据中台,还可以降低车辆硬件的算力要求,让车辆可以减少对高算力芯片的依赖,这在当前的市场环境下无疑是一个更经济实惠的解决方案。共用的数据中台,不仅可以为车辆带来算力支撑,而且可以较好的完成各种功能的呈现,其关键在于百度CNN模型和CPU算力优化的支撑。ANP2.0通过对算力和CPU的极致优化,能在双TDA4VM低算力平台实现高阶行泊一体,具有高算力稠密度、单位算力技术能力更高等特点。
高精地图的加持,则可以让ANP2.0更好地应对各种复杂路况。基于百度的生态能力、百度地图提供的高精导航和定位地图,ANP2.0可以享受更优质的图端服务。相较于外采高精地图的模式,百度有更高的调试效率,能极大减少联调成本。同时,利用百度手机地图的动态数据,ANP2.0智能驾驶可以更从容。如利用手机地图的“经验车速”,在匝道等位置,百度智驾能为用户提供“更像人开”而非机械的智驾体验。依托百度高精度地图和强大的计算平台(CNN模型和CPU算力优化),ANP2.0可以在双TDA4VM平台上实现全场景360°全向感知,让车辆在使用低成本硬件配置的情况下,呈现较好的自适应巡航、智能巡航、自动变道、进出匝道、进出服务区等HANP高速领航辅助驾驶功能,同时还可以在停车场景下实现360全景、APA自动泊车、高阶的HAVP记忆泊车等功能。
在郭阳看来,高精地图、激光雷达之于自动驾驶,相当于登山过程中的“登山杖”,能够降低登山的难度。3-5年内城市高阶辅助驾驶仍无法完全摆脱高精地图。现在流行的BEV方案,挑战不是模型和网络,而是高质量数据的低成本、高效地获取。百度规模化生产高精地图的能力,也能够为BEV高自动化生产训练数据提供助力。在有高精地图区域等于增加了一层车端冗余,与地图互为校验,能够应对道路变更等地图存在的挑战;在暂时没有被高精地图覆盖的区域,也能够通过BEV的道路结构感知,做功能降维,仍可以让用户体验到辅助驾驶带来的便捷。

全栈自研的系统能力形成强大竞争力
自有算力平台、高精度地图以及在智能网联汽车方面深厚的人才底蕴、体系能力,不仅为ANP2.0提供了强大的技术支撑,而且也让其更低成本成为了可能,自然也成就了其相较于其他供应商更好量产的优势。而这一切的实现都得益于过去10年间,百度在智能网联汽车方面的积累。
自2013年,百度无人车项目起步,至今,百度Apollo在自动驾驶领域已经深耕10年,形成了强大的系统能力。事实上,目前市场上高级别辅助驾驶的产品并不少,但能让驾驶者放心使用的却并不多,其关键问题在于可靠性不足,这方面,百度已经跑在了前面。基于统一的数据云平台,ANP2.0能与百度Apollo RoboTaxi形成完整的数据闭环,经过后者近10年积累的真实路测、数十万例仿真Case等海量数据的训练,同时,ANP2.0也经过了30万公里以上的实际道路泛化测试,其各项功能得以实现充分的测试验证。
“ANP2.0具有很强大的学习能力。”郭阳表示,经过多年积累和超过30万公里的实际道路测试和上千万公里的仿真测试,ANP2.0的量产产品可以较好地实现高阶行泊一体功能,且拥有较稳定的功能状态。在车辆投入使用的过程中,ANP2.0强大的学习能力,可以帮助车辆在常用路段实现更好的提升,“就像记忆泊车一样,有过学习之后,会有更好的表现。”
“在中国这样一个复杂的路况和场景下,百度通过跟高精地图的融合,能为用户提供更好的辅助驾驶体验感。”郭阳强调,“百度更像一个全栈自研的智能驾驶方案提供商,地图自有、软件也以自研为主。”依托百度自身的高精度地图和在自动驾驶领域多年的系统开发和积累,作为一个专业的第三方智能驾驶方案提供者,百度有强大的专业优势,进而可以更好的转化成规模优势,不断反哺百度智能驾驶技术的提升,从而形成百度的竞争力。
郭阳透露,百度的智能驾驶产品正处于快速发展中,目前的量产及定点客户包括广汽埃安、长城等多家主流传统车企,及多家头部新能源车企。未来,百度赋能的智驾产品的搭载量会保持平均每年100%的增速。“智能驾驶的窗口期已开,车企需要在3-5年内实现智驾的规模化落地,而这正是我们的机会。”郭阳表示,兼顾智驾落地的成本、效率与安全,未来3-5年内,百度智能驾驶方案的量产步伐将不断加快。